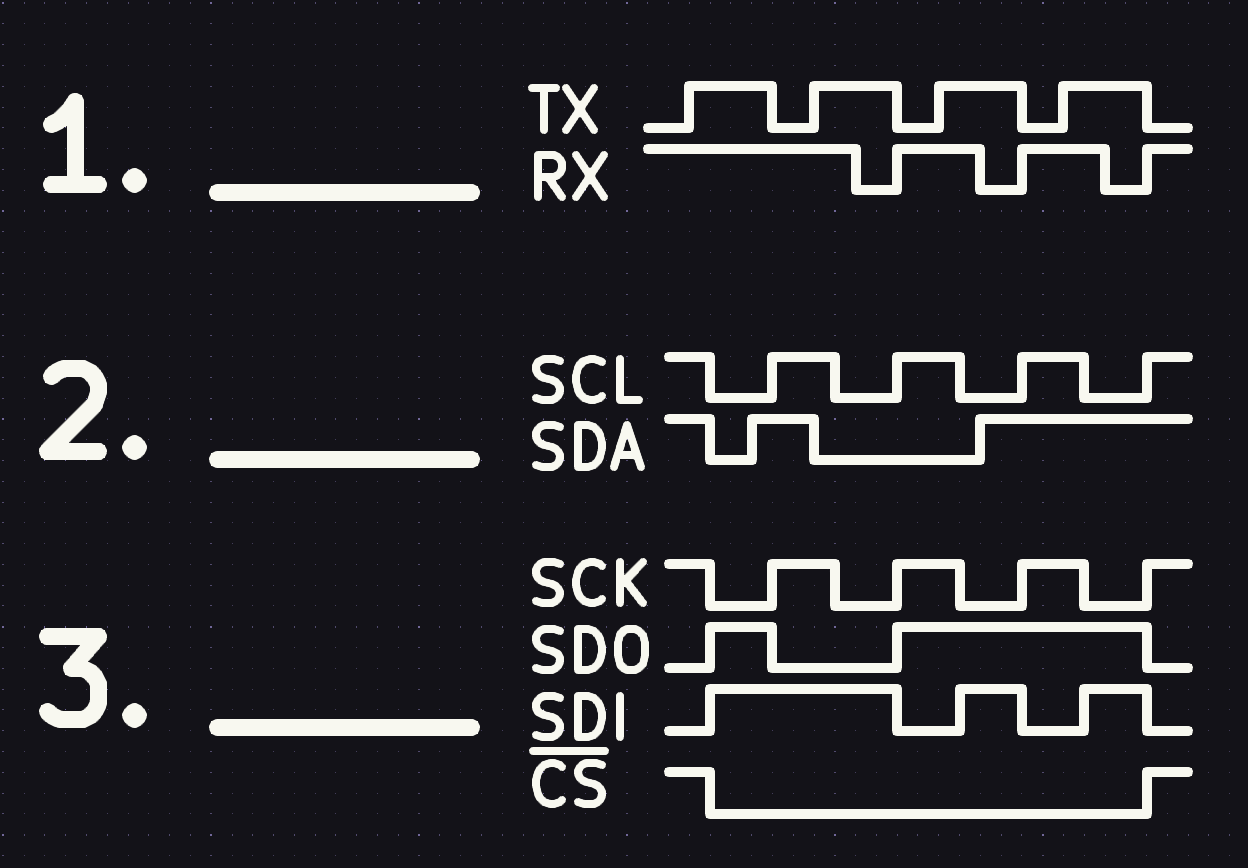
Je publie 4 images que je trouve très bien faites montrant 3 protocoles série. Tout le crédit revient à i2cjak, pourriez-vous deviner quels sont les 3 protocoles représentés sur l’image ?
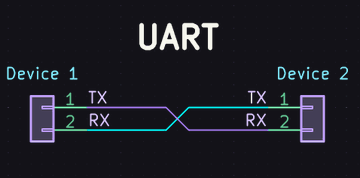
1. Vous l’avez deviné, UART ! UART est comme le code Morse pour les ordinateurs. La vitesse est mesurée en « bauds », avec un maximum de ~1-10mbps, et il s’agit normalement d’un protocole point à point.
Certains servos et (rarement) capteurs utilisent UART. UART, qui signifie « universal async rx/tx », ne nécessite pas de ligne d’horloge (CLK) supplémentaire. C’est le standard pour l’impression des logs de débogage sur les appareils embarqués !
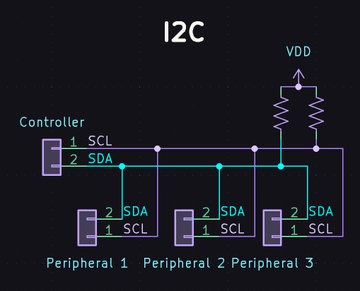
2. C’est le bus I2C ! Comparé à UART, I2C peut connecter un contrôleur (ou master) à un maximum de 128 périphériques (ou slave). Les vitesses sont de 100kbps-1mbps.
Tous les périphériques sur le bus ont une adresse pré-assignée afin que le contrôleur puisse parler à un périphérique spécifique.
L’I2C est à « drain ouvert », ce qui signifie que tout périphérique sur le bus peut tirer sa ligne de données vers le bas. Cela nécessite l’utilisation de résistances pull-up. N’oubliez jamais les résistances pull-up !
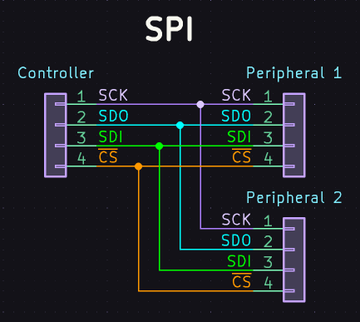
3. C’est SPI. SPI est également un bus comme I2C, mais il est « full-duplex » (rx et tx simultanément) au lieu de « half-duplex » (tx séquentiel avec rx).
Il n’a pas non plus de système d’« adressage » comme l’I2C, mais utilise une ligne supplémentaire de « sélection de puce » pour choisir le dispositif sur le bus auquel s’adresser.
SPI est une norme ad hoc, de sorte que certains dispositifs peuvent nécessiter des configurations légèrement différentes pour communiquer correctement. Il faut s’attendre à des vitesses plus élevées que l’I2C (le SPI n’est pas un drain ouvert, mais un push pull), autour de 32mbps maximum.
Laisser un commentaire